

电动快换锁紧、传动机构的设计及优化
能源与动力工程资助企业: 上海桥田智能设备有限公司
企业导师: 尹朝新

指导教师: 周忠岳
项目成员: 李健翔 郭威 王健
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
随着工业自动化发展,快换盘在现代生产线中作用凸显。它使机器人快速更换末端执行器,无缝切换任务,提高生产效率和灵活性。
相比于大型、重负载的工业机器人,小型、低负载的协作机器人也逐渐普及。不同于大型工业机器人,小型的协作机器人多使用电机进行驱动,仍然使用气、液作为快换盘的动力源需要另外配置气、液源,这对于快换盘在协作机器人的实际应用方面是不现实的,如何实现无气源等情况下的更安全、高效的快换,简化生产流程,提升产品质量,电动快换盘成为该行业未来发展的趋势。
项目目标
本项目旨在开发一套以电力为动力源的快换盘,以解决气源受限的工作场景下的需求,并针对实际应用中的问题提出创新的解决方案。
由王健完成机器人电动快换盘锁紧、传动方案设计与优化;由郭威完成电动快换盘传动机构力学设计与寿命评价;由李健翔完成电动快换盘断电防脱落策略研究。通过建模仿真等设计手段,开发出一套性能优异的电动快换,实现小型机器人末端执行器的快速切换,并且为企业后续的相关开发提供参考。
项目成果
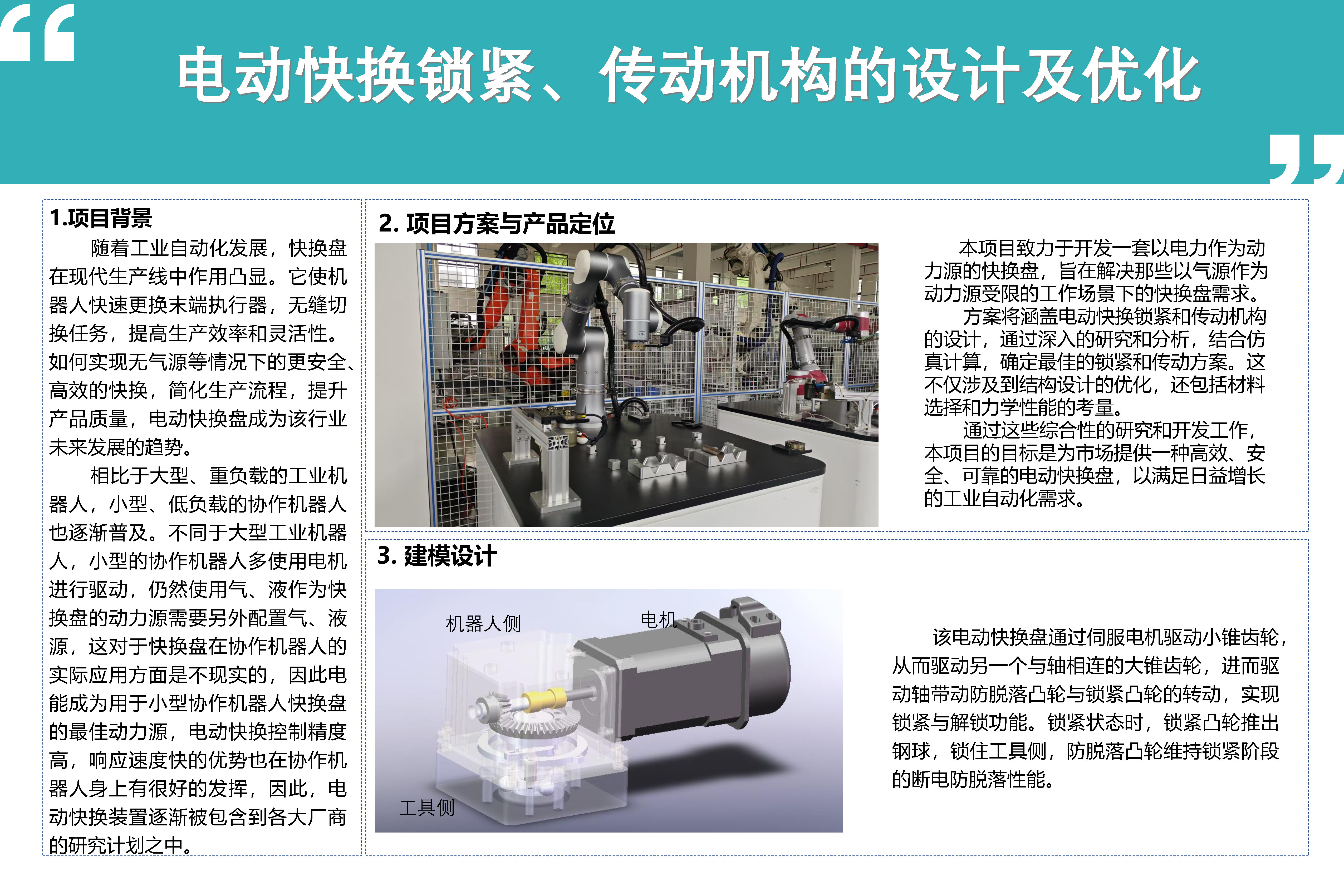
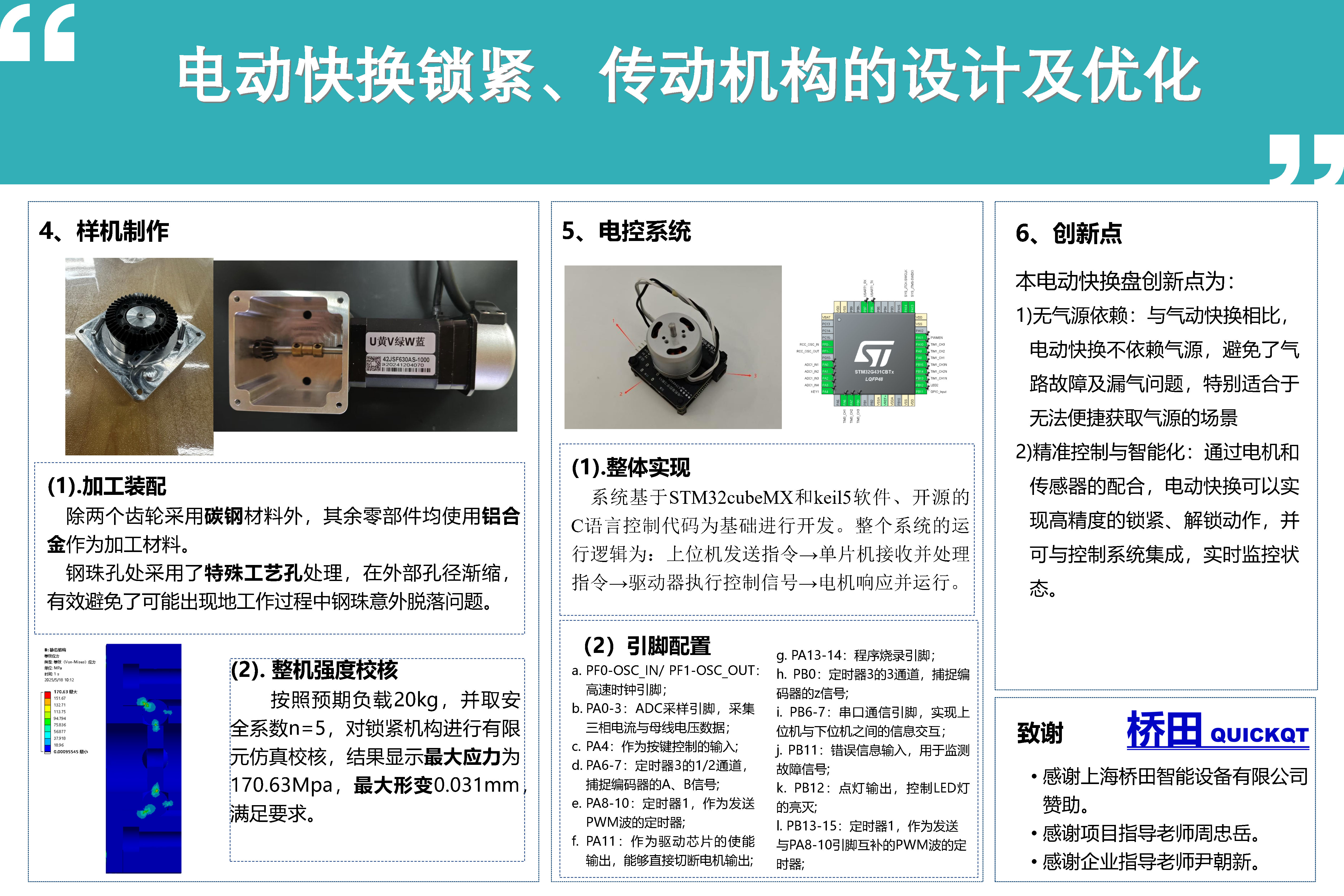
项目成员已经完成了电动快换盘整体结构的设计与电机控制部分,并对关键部位零件完成了强度校核。该电动快换盘通过伺服电机驱动小锥齿轮,从而驱动另一个与轴相连的大锥齿轮,进而驱动轴带动防脱落凸轮与锁紧凸轮的转动,实现锁紧与解锁功能。锁紧状态时,锁紧凸轮推出钢球,锁住工具侧,防脱落凸轮维持锁紧阶段的断电防脱落性能。并实现了无气源依赖、精准控制等创新点,基本达到预期目标。




